ЁЁЁЁеЊ вЊЃКдкЙњФкЭтбаОПЛљДЁЩЯЗжЮіСЫЕчЖЏБфНАОрЯЕЭГЕФНсЙЙЃЌДгЛњаЕКЭЫХЗўЧ§ЖЏСНВПЗжЗжБ№баОПСЫЗчСІЗЂЕчЛњзщЕФЕчЖЏБфНАОрЯЕЭГЃЌУЛМЦСЫвдШ§ЯргРДХЭЌВНЕчЛњЮЊЫХЗўЕчЛњЕФЕчЖЏБфНАОрЯЕЭГЁЃЊЅ
ЁЁЁЁЙиМќДЪЃКЕчЖЏБфНАОрЃКЫХЗўПижЦЃЛШ§ЯргРДХЭЌВНЕчЛњЊЅ
ЁЁЁЁ
ЁЁЁЁ1 ЕчЖЏБфНАОрЯЕЭГИХЪіЊЅ
ЁЁЁЁ
ЁЁЁЁБфНАОрЛњЙЙОЭЪЧдкЖюЖЈЗчЫйИННќ(вдЩЯ),вРОнЗчЫйЕФБфЛЏЫцЪБЕїНкНАОрНЧ,ПижЦЮќЪеЕФЛњаЕФм,вЛЗНУцБЃжЄЛёШЁзюДѓЕФФмСП(гыЖюЖЈЙІТЪЖдгІ),ЭЌЪБМѕЩйЗчСІЖдЗчСІЛњЕФГхЛїЁЃдкВЂЭјЙ§ГЬжа,БфНАОрПижЦЛЙПЩЪЕЯжПьЫйЮоГхЛїВЂЭјЁЃБфНАОрПижЦЯЕЭГгыБфЫйКуЦЕММЪѕЯрХфКЯ,зюжеЬсИпСЫећИіЗчСІЗЂЕчЯЕЭГЕФЗЂЕчаЇТЪКЭЕчФмжЪСПЁЃЊЅ
ЁЁЁЁЕчЖЏБфНАОрЯЕЭГОЭЪЧПЩвддЪаэШ§ИіНАвЖЖРСЂЪЕЯжБфНАЃЌЫќЬсЙЉИјЗчСІЗЂЕчЛњзщЙІТЪЪфГіКЭзуЙЛЕФЩВГЕжЦЖЏФмСІЁЃетбљПЩвдБмУтЙ§диЖдЗчЛњЕФЦЦЛЕЁЃЊЅ
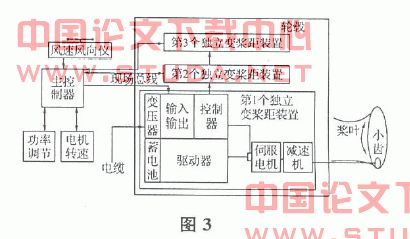
ЁЁЁЁЭМ1КЭЭМ2ЗжБ№ЪЧЕчЖЏБфНАОрЯЕЭГЕФВМОжЭМКЭЕчЖЏБфНАОрЯЕЭГЕФИХФюЩшМЦЭМЁЃШ§ЬзаюЕчГиКЭжсПижЦКавдМАЫХЗўЕчЛњКЭМѕЫйЛњЗХжУгкТжьБДІЃЌУПжЇНАвЖвЛЬзЃЌвЛИізмЕчЦјПЊЙиКаЗХжУдкТжьБКЭЛњВеСЌНгДІЃЌећИіЯЕЭГЕФЭЈбЖзмЯпКЭЕчРТППЛЌЛЗгыЛњВеЕФжїПижЦЦїСЌНгЁЃ ЊЅ
ЁЁЁЁ 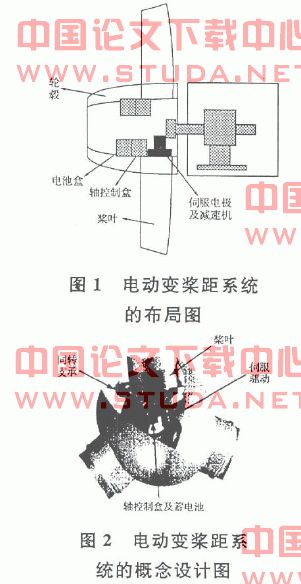
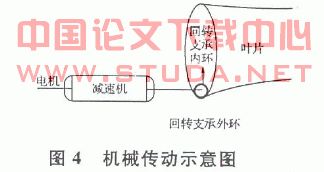
ЁЁЁЁЭМ3ЮЊЕчЖЏБфНАОрЯЕЭГЕФЙЙГЩПђЭМЃЌжїПижЦЦїгыТжьБФкЕФжсПижЦКаЭЈЙ§ЯжГЁзмЯпЭЈбЖЃЌДяЕНПижЦШ§ИіЖРСЂЕФБфНАОрзАжУЕФФПЕФЁЃwwW.11665.cOMжїПижЦЦїИљОнЗчЫйЃЌЗЂЕчЛњЙІТЪКЭзЊЫйЕШЃЌАбУќСюжЕЗЂЫЭЕНЕчЖЏБфНАОрПижЦЯЕЭГЃЌВЂЧвЕчЖЏБфНАОрЯЕЭГАбЪЕМЪжЕКЭдЫаазДПіЗДРЁЕНжїПижЦЦїЁЃЊЅ
ЁЁЁЁЕчЖЏБфНАОрЯЕЭГБиаыТњзуФмЙЛПьЫйЯьгІжїПижЦЕФУќСюЃЌгаЖРСЂЙЄзїЕФБфНАОрЯЕЭГЃЌИпадФмЕФЭЌВНЛњжЦЃЌАВШЋПЩППЕШЕФвЊЧѓЁЃЯТУцОЭЗжБ№ДгЛњаЕКЭЫХЗўЧ§ЖЏСНИіВПЗжНщЩмвЛЯТЕчЖЏБфНАОрЯЕЭГЁЃЊЄ
ЁЁЁЁ2 ЛњаЕВПЗжЊЅ
ЁЁЁЁ
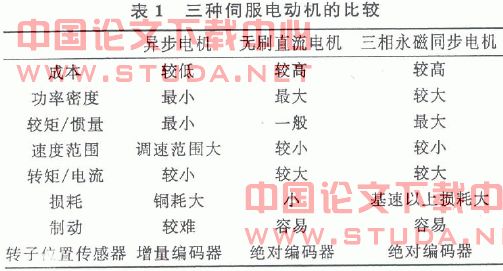
ЁЁЁЁ ВЛЭЌгквКбЙЧ§ЖЏБфНАОрЯЕЭГЃЌЕчЖЏБфНАОрЯЕЭГВЩгУШ§ИіНАвЖЗжБ№ДјгаЖРСЂЕФЕчЧ§ЖЏБфНАОрЯЕЭГЃЌЛњаЕВПЗжАќРЈЛизЊжЇГаЃЌМѕЫйЛњКЭДЋЖЏЕШЁЃМѕЫйЛњЙЬЖЈдкТжьБЩЯЃЌЛизЊжЇГаЕФФкЛЗАВзАдквЖЦЌЩЯЃЌвЖЦЌжсГаЕФЭтЛЗЙЬЖЈдкТжьБЩЯЁЃЕБЕчЧ§ЖЏБфНАОрЯЕЭГЩЯЕчКѓЃЌЕчЖЏЛњДјЖЏМѕЫйЛњЕФЪфГіжсаЁГнТжа§зЊЃЌЖјЧваЁГнТжгыЛизЊжЇГаЕФФкЛЗФіКЯЃЌДгЖјДјЖЏЛизЊжЇГаЕФФкЛЗгывЖЦЌвЛЦ№а§зЊЃЌЪЕЯжСЫИФБфНАОрНЧЕФФПЕФЁЃЭМ4ОЭЪЧЛњаЕДЋЖЏЪОвтЭМЁЃЊЅ
ЁЁЁЁ
ЁЁЁЁжЦЖЏзАжУЕФЬиЕуЪЧПеЦјЖЏСІбЇжЦЖЏЩВГЕЕЅЖРгЩБфНАОрПижЦЃЌНАвЖЛёЕУГфЗжЕФЩВГЕзїгУЁЃМДЪЙвЛИіНАвЖЩВГЕжЦЖЏЪЇАм, ЦфЫќЖўИівЖЦЌвВПЩвдАВШЋНсЪјЩВГЕЕФЙ§ГЬЃЌЬсИпСЫећИіЯЕЭГЕФАВШЋадЁЃжЦЖЏЯЕЭГЛЙзАБИСЫБИгУЕчдДЃЌЬсЙЉИјЙЪеЯЛђепЮЌаоЪБКђПЩвдПьЫйзМШЗЕиЪеЛиНАвЖЁЃЊЄ
ЁЁЁЁ
ЁЁЁЁ3 ЫХЗўЧ§ЖЏВПЗж
ЁЁЁЁЊЅ
ЁЁЁЁЪИСППижЦММЪѕНтОіСЫНЛСїЕчЖЏЛњдкЫХЗўЧ§ЖЏжаЕФЖЏЬЌПижЦЮЪЬтЃЌЪЙНЛСїЫХЗўЧ§ЖЏЯЕЭГЕФадФмПЩгыжБСїЯЕЭГЯрцЧУРЃЌдкФГаЉЧщПіЯТЃЌЩѕжСГЌЙ§СЫжБСїЯЕЭГЕФадФмЁЃЬиБ№дк20kwвдЯТЕФЙІТЪЗЖЮЇФкЃЌОЋЖШгаЬиЪтвЊЧѓЕФЧщПіЯТЃЌНЛСїдНРДдНвЊШЁДњжБСїЁЃдкетжжЧщПіЯТЃЌИагІЕчЖЏЛњЃЌЮоЫЂжБСїЕчЖЏЛњКЭШ§ЯргРДХЭЌВНЕчЖЏЛњИїгаЬиЩЋЁЃЊЄ
ЁЁЁЁ3.1 Ш§жжЫХЗўЕчЖЏЛњЕФБШНЯЊЅ
ЁЁЁЁЮвУЧЖМжЊЕРЃЌНЛСїЫХЗўЧ§ЖЏЯЕЭГгЩвдЯТШ§ИіВПЗжзщГЩЃКЫХЗўЕчЖЏЛњЃЌЧ§ЖЏзАжУЃЌПижЦЯЕЭГЁЃЯТУцОЭДгГЩБОЃЌЙІТЪУмЖШЃЌзЊОи/ЙпСПЃЌЫйЖШЗЖЮЇЃЌзЊОи/ЕчСїЃЌЫ№КФЃЌжЦЖЏЃЌзЊзгЮЛжУДЋИаЦїетМИИіЗНУцНјааБШНЯЁЃЊЅ
ЁЁЁЁ
ЁЁЁЁвдЩЯОЭЪЧЖдШ§жжЫХЗўЕчЖЏЛњЕФБШНЯЃЌЛљгкЗчСІЗЂЕчЛњзщЕчЖЏБфНАОрЯЕЭГЕФЬиЕуКЭАВШЋвЊЧѓЃЌзлКЯШ§жжЫХЗўЕчЖЏЛњЕФЬиЕуПМТЧЃЌФтВЩгУШ§ЯргРДХЭЌВНЕчЖЏЛњзїЮЊЕчЖЏБфНАОрЯЕЭГЕФЫХЗўЕчЖЏЛњЁЃЊЄ
ЁЁЁЁ3.2 ЕчЖЏБфНАОрЫХЗўЯЕЭГЊЅ
ЁЁЁЁЫфШЛШ§ЯргРДХЭЌВНЕчЖЏЛњдквЛаЉЗНУцВЛОЁШчШЫвтЃЌЕЋЪЧЫќЕФЕчЛњНсЙЙМђЕЅЃЌЮЌЛЄЗНБуЃЌжЛгаЖЈзгЯпШІЗЂШШЃЌШнвзЪЕЯжИпЫйЃЌНЯШнвзЪЕЯжПьЫйжЦЖЏЁЃЬиБ№ЖдгкЗчЛњЖјбдЃЌжмЮЇЛЗОГЖёСгИДдгЃЌетбљЬиБ№ЪЪгУгкШ§ЯргРДХЭЌВНЕчЖЏЛњЁЃЊЅ
ЁЁЁЁШ§ЯргРДХЭЌВНЕчЖЏЛњНЛСїЫХЗўЯЕЭГДѓжТгаЫФВПЗжзщГЩЃКШ§ЯргРДХЭЌВНЕчЖЏЛњЃЌЫйЖШКЭЮЛжУДЋИаЦїЃЌБфЦЕЦїЃЌПижЦЦїЁЃЊЅ
ЁЁЁЁШ§ЯргРДХЭЌВНЕчЖЏЛњжївЊгЩзЊзгКЭЖЈзгзщГЩЃЌдкзЊзгЩЯзАгаЬиЪтВФСЯаЮзДЕФгРДХЬхЃЌгУвдВњЩњКуЖЈДХГЁЃЌУЛгаРјДХШЦзщЁЃЖЈзгЩЯгаШ§ЯрЕчЪрШЦзщЃЌНгПЩПиЕФБфЦЕЕчдДЁЃЊЅ
ЁЁЁЁЖдгкШ§ЯргРДХЭЌВНЕчЖЏЛњРДЫЕЃЌЪЕМЪЩЯЃЌМьВтЕчЖЏЛњЕФзЊзга§зЊЫйЖШЃЌДХМЋЮЛжУКЭЯЕЭГЕФЖЈЮЛПижЦШ§ИіЙІФмвЊВЩгУОјЖдЪНЙтЕчБрТыЦїЁЃЊЅ
ЁЁЁЁФцБфЦїЪфГіЦЕТЪПЩЕїЕФНЛСїЕчЃЌЪфШыЕНЕчЪрШЦзщжаЁЃpwmЛиТЗвдвЛЖЈЕФЦЕТЪВњЩњГіДЅЗЂЙІТЪЦїМўЕФПижЦаХКХЃЌЪЙЙІТЪФцБфЦїЕФЪфГіЦЕТЪКЭЕчбЙБЃГжаЕїЙиЯЕЃЌВЂЪЙСїШыЕчЪрШЦзщжаЕФНЛСїЕчСїБЃГжбЯИёе§ЯвадЁЃСэЭтЃЌЕчЖЏБфНАОрЕФШ§ИіЫХЗўЧ§ЖЏЦїБиаыдкЦфФкВПЪЕЯжОЋШЗЕФЭЌВНЙІФмЃЌвЊЧѓжЎМфЕФЭЈбЖБиШЛвЊДяЕНЯЕЭГЕФећЬхОЋЖШвЊЧѓЁЃЊЅ
ЁЁЁЁ дкПижЦЛиТЗжавЛЙВгаШ§ИіПижЦЛЗЃКЮЛжУЛЗЃЌЫйЖШЛЗЃЌзЊОиЛЗЁЃвЛАуЧщПіЯТЃЌЮЛжУЛЗВЩгУБШР§ПижЦЙцТЩЃЌЫйЖШЛЗВЩгУБШР§Л§ЗжПижЦЙцТЩЃЌзЊОиЛЗВЩгУПеМфЪИСППижЦЁЃЊЅ
ЁЁЁЁ ЕБШЛЃЌЮЛжУПижЦжївЊЪЧДяЕНОЋШЗЕФЮЛжУПижЦЃЌЫйЖШЛЗвЊЪЕЯжПьЫйЕФИњзйЃЌЕчСїЛЗЪЕЯжПьЫйЕФЖЏЬЌЯьгІЁЃдкЕчЖЏБфНАОрЫХЗўПижЦжаЃЌжїПижЦЦїИјГіЮЛжУУќСюжЕЃЌгыЮЛжУЗДРЁНјааБШНЯЃЌЮЛжУЕїНкЦїЕФЪфГіОЭЪЧЫйЖШЕїНкЦїЕФЪфШыЃЌНјааБШР§Л§ЗжЃЌЫйЖШЕїНкЦїЪфГізЊОиУќСюжЕЃЌгыЗДРЁжЕБШНЯКѓЃЌВюжЕЫЭЕНзЊОиЕїНкЦїжаЃЌЪфГіОЭЪЧзЊОиЕчСїИјЖЈжЕЃЌВЂЧвАбЕчСїжИСюЪИСППижЦдкгыДХМЋЫљВњЩњЕФДХЭЈЯре§НЛЕФПеМфЮЛжУЩЯЃЌДяЕНзЊОиПижЦЁЃЊЅ
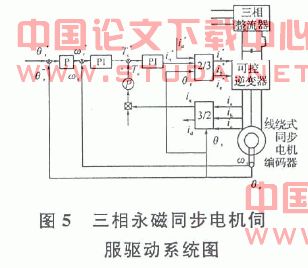
ЁЁЁЁдкЭМ5жаЃЌЖЈзгЕчСїМьВтжЕiaЃЌibЃЌicЃЌОЙ§abcжсЯЕЕНdqа§зЊжсЯЕЕУЪЪСПБфЛЛКѓЃЌЕУЕНМьВтжЕiqКЭidЁЃЊЅ
ЁЁЁЁЪЧгРДХЬхЛљВЈРјДХДХГЁСДЙ§ЖЈзгШЦзщЕФДХСДЃЌЖдгкШ§ЯргРДХЭЌВНЕчЖЏЛњЪЧКуЖЈжЕЃЌЭЈЙ§УцзАЪНpwsmЕФЕчДХзЊОиЙЋЪН ПЩвдЕУЕНзЊОиЗДРЁжЕЁЃpnЪЧМЋЖдЪ§ЁЃЊЅ
ЁЁЁЁ ЕБЕчЖЏЛњЫйЖШГЌЙ§ЛљжЕЪБЃЌвЊНјааШѕДХПижЦЃЌашвЊМгШыidЃЌЫљвдid*вЊИљОнШѕДХдЫааЕФОпЬхЧщПіЖјШЗЖЈЁЃЊЅ
ЁЁЁЁ гЩiq*КЭid*КЭзЊзгЮЛжУЃЌЭЈЙ§dqа§зЊжсЕНabcжсЯЕЕФБфЛЛЃЌЕУЕНШ§ЯрЖЈзгЕчСїУќСюжЕЁЃгЩШЮвтзЊЫйІиа§зЊСНЯрзјБъЯЕdЁЂqЕНЯрОВжЙзјБъЯЕabcЕФБфЛЛеѓЁЃЊЅ
ЁЁ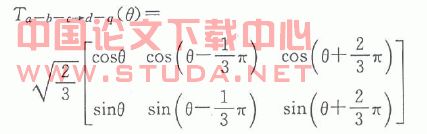 ЁЁ
ЁЁ
ЁЁЁЁ4 НсТлЊЅ
ЁЁЁЁ
ЁЁЁЁ БОЮФЖдЕчЖЏБфНАОрЕФНсЙЙКЭЬиЕуНјааСЫНщЩмЃЌзХжиЖдЫХЗўЧ§ЖЏПижЦВПЗжНјааСЫЩшМЦКЭЗжЮіЃЌПЩвдзїЮЊЙЄГЬЩшМЦЕФГѕВНВЮПМЃЌдкОпЬхЕФЫХЗўПижЦВПЗжЕФбаОПЙЄзїашвЊНјвЛВНЩюШыЁЃЊЅ
ЁЁЁЁ
ЁЁЁЁВЮПМЮФЯзЊЄ
ЁЁЁЁЃл1ЃнЄ@e. a. bossanyi. adaptive pitch control for a 250kw wind turbine, proc. british wind energy conference.1986,pp.85-92.ЊЄ
ЁЁЁЁЃл2ЃнЄ@iqbal, m. t. coonick, a. and ereris, l. l. dynamic control options for variable speed wind turbines. wind engineering. 1994, 18 (1), pp.1-12.ЊЄ
ЁЁЁЁЃл3ЃнЄ@xin ma. adaptive extremum control and wind turbine control. phd thesis. technical university of denmarkЃЎ1997.