ժ Ҫ��������tms320f240Ϊ�����������ɵ�����ͬ�������һ�ֿ��Ʒ��������ݰ�������ͬ���������ϵͳ��Ӳ��ʵ�ַ������Լ�ʵ��ת��ֱ�ӿ��Ƶ�������������
�����ؼ��ʣ�dsp��ͬ�������ת��ֱ�ӿ��ƪ�
����
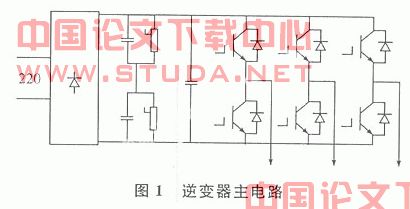
����1 ����·���֪�
����
������ϵͳ����·���ý�һֱһ���ṹ��������������ֲ��õ�ѹ�������������·�Ľṹ��ͼ����ʾ�������ཻ���羭�������������˲������ipm��pn����ˡ�ipmѡ�����˾��pm50rva 120(����ѹΪ1200v������Ϊ50a )����������ѡ�����˾��rm30tb��h(�ĸ���������60a��������ѹ800v�����������ģ���ṩ�����������е�����)����
����
����2 dsp����ϵͳ��
����
������һ������Ҫ����ϵͳ�����źŵĴ�����dsp����ϵͳ����·�������뱣�������֡� ��
����2.1 ϵͳ�IJ����źŴ������֪�
��
��
������1�������������ź�������
��������ͬ�����ת��ֱ�ӿ����ڵ��������ʱ����Ҫ֪��ת�ӵ�λ����ȷ��������Ӵ����ij�ʼֵ��ͬʱ��Ҫ�ù������̵��źż�������ת��ʵ���ٶȱջ���ϵͳ��Ҫ�Թ������̵�uvw��ab�����źŽ��д�������5���źž�����������ֱ������dspоƬ�������ݵĴ���������Www.11665.cOM��
������2�����������ֱ��ĸ�ߵ�ѹģ���źš���
�������ڵ�������ߵ�û���������������������ia+ib+ic=0�Ĺ�ϵ��ֻҪ��������ĵ����Ϳ��Լ���õ����еĶ��ӵ�����ԭ����ϵͳ�����䱸���������������������DZ�����·���˲ʱ���������ֱ��ĸ�ߵ�������Ҫ��ϵͳ�䱸���ĸ�������������Ϊ�������������ߵ�ѹ��ֱ��ĸ�ߵ�ѹ��ϵͳ�����ĸ���ѹ���������Թ����ֲ�ͬ���Ʋ���ʵʩ���ۺϡ��Ե����͵�ѹ�źŵĴ�����Թ���������ź���˵��Ը���һЩ���������źŴ�����ͼ2����
�������۵�������Ԫ�����ǵ�ѹ����Ԫ����������źŶ��ǵ������źţ����뾭�������������ת��Ϊ��ѹ�źš����źŲ���ֱ���͵�dsp��������Ϊdspֻ�ܲ���0����v�ĵ�ѹ�źţ�������Ԫ��������ź������и������뾭�����������͵�ƽ����������Ȼ��Ҫ����Ӳ���˲�����ȥ����Ҫë�̸����źţ������͵�dsp��������
����2.2 dsp����ϵͳ��
��������ѡ����ti��Ե�������������ר����Ƶ�tms320f240 �����������ٶ���20mips��һ��ad����ʱ��Ϊ7.2us��������������ͨ�ö�ʱ����ÿ��ͨ�ö�ʱ��������ʱ��εĶ�ʱ���ܣ���������Ԥ����ʱ����бȽϲ�������������Ĺ��ܣ����Ժܷ����ʵ��pwm�������ר���������������źŴ����ĵ�·����ʹ�ò����ٶȺͲ��������ת��λ�ø�Ϊ���ף�����wd��ʱ���������ڳ�������ɵ�����и�λ��������12��adת��ͨ������������ͬʱ��������adת������12·pwm�����������6·��pwm����ǿ���ͨ����̣�������ʵ�ֿռ�ʸ��pwm�����ҿ���������ʱ�䣻������������ⲿ�жϵĶ˿�ר�õ�·������������ô��Ӳ����Դ�������Էdz��õ�ʵ�ֵ�����Ƶ�һ��Ҫ��
��������ϵͳ�������Ǹ��ݼ��õ��ĵ����ѹ�������źź������źţ�ͨ�������㷨ʵ�ֶԵ���Ŀ��ơ�Ϊ��ʵ������������Ҫ��f240������չ����չ��ͼ����ͼ3����
����
����3 ʵʱ���������Ľṹ��
����
����������Ҫʵ�ֵĹ��ܿ��Է�Ϊ���¼��飺ϵͳ�����ij�ʼ���������ת�ӵij�ʼλ�ã�ת�ٵIJ�����pi���ƣ�������������뱣���Լ�dtc�㷨��ʵ�֡�����֮�Ҫ�������ݴ�����ת�ؿ����źźʹ���������Ϣѡ����ʵ�ѹʸ���Ŀ��ر�����
��������������Ҫ�����۳���������ܣ�Ȼ���ٶ�������Ҫ���ܵ�ʵ�����Լ��ܡ� ��
������ͼ4��������ϵͳ������������жϳ�������ͼ����
����
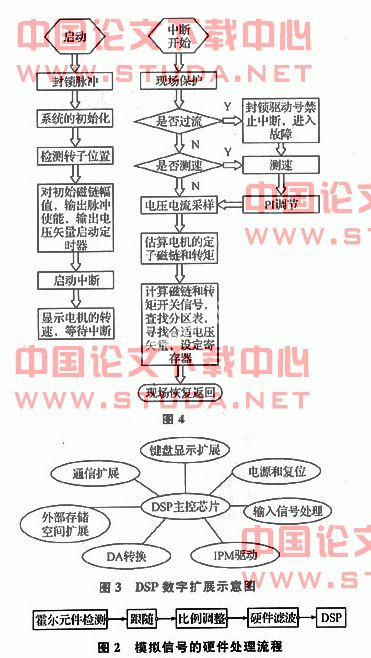
����ϵͳ�ij�ʼ������dspӲ���ij�ʼ��(��Զ�ʱ����pwm���ơ��������Ƶ��ⲿ�¼��Ĵ�����ֵ)�����������ij�ʼ��(��pi������������Ҫ���м䳣����)�����֡���
������1�������ʼ����ֵ��ȷ������
����2500p/r������Ƶ�õ�10000p/r�ķֱ��ʡ���100r/min��������£����ٵ�������Ϊ1%.�����ľ�����������ϵ������ͬ�����ת��ֱ�ӿ�����˵������ʱ���ת��λ�õļ��dz���Ҫ����Ϊ���Ӵ����ij�ʼֵҪ��ת�ӳ�ʼλ����ȷ�����ھ�ֹ������£�����ʽ�����̲������ṩת�ӵ�λ����Ϣ�����Ա�����þ���ʽ������ʵ�֡����Dz��õĹ������̸պ���uvw��������ʽ�źſ�������ȷ��ת����1/6��(60��)�Ľ���λ�á���
������2���ٶȲ������ٶ�pi�����������ֻ�ʵ�֡���
����ͨ�����õ��ٶȲ���������m����t����m/t��������m/t��������ߣ���ʵ��ϵͳ�Ը���Ϊ��Ҫ���жΣ����Ҳ����������̷ֱ��ʸ�Ϊ2500��/�ܣ����Բ���m�����٣����ڸߵ�ת�پ�ȷ�������㹻�����ٵIJ�������Ϊ6ms��������̵�ab�źŷֱ���Ϊͳ������ʵ��ϵͳ�IJ��پ���Ҳ֤ʵ��������ۡ�����õ��ٶ�֮��Ҫͨ���ٶ�pi���������ת�زο�ֵ����
������3��dtc�����㷨�����ֻ�ʵ�֡���
����dtc�Ŀ����㷨��Ҫ�����¼������֣��������ѹ�������������任�������۲⣬�ͻ����ƣ����Ӵ���������ʵ�ֺ������ѹʸ����ѡ����ʵ��ϵͳ�У���������е���������С�������ܴ�����ĸ�ߵ�ѹͨ��Ϊ300v�������صĵ����Ų���0.5a�����Ա��������е������������ñ�ôֵ�����趨dsp�е����ݶ�����q12�ı����ʽ�����������������ı�д���������Ҳ����ٿ��Ƿ���������ת�����⡣��
����
�����ο����ת�
������1�ݤ@Ҷ������.��������Ӧ�ü�����m��.�������廪��ѧ������.��
������2�ݤ@�������.mcs����51ϵ�е�Ƭ��ʵ�ýӿڼ�����m��.�������������պ����ѧ������.