摘 要:多智能主体技术是人工智能领域的最新成果之一,应用它来进行工程机械的机群智能化,可提高机群整体的智能化水平。将多智能主体技术应用于筑路工程机械机群,建立并深入探究了改工程机械机群的分层混杂体系结构,这种结构能以较低的成本实现很高的智能化程度,且具有灵活、易扩展等特点。
关键词:多智能主体;筑路机械机群;研究
1筑路机械机群智能化的多智能主体系统基础
1.1筑路机械机群系统混杂分层结构
与一般的多智能主体系统不同,在本文中,多智能主体系统被应用于工程机械机群的智能化,具体来说,是以高等级路面施工机群的智能化为研究对象。
高等级路面施工机群主要由以下5种机械设备组成:沥青拌合设备、摊铺机、振动压路机、装载机和自卸车。由于是路面施工,这些设备的工作环境以高噪声、高振动、受天气状况影响大等为特点。而且,结合现阶段工程实际,要尽量控制机群智能化所需成本,否则,将会降低施工企业对机群智能化改造的接受程度。
当前的筑路工程中,主要靠人工指挥,机械由人工操作,存在着如下弊端:资源配置不够合理;施工信息交换量小,实时性差;易出现物料断流或积压(因为物料具有实效性,所以造成极大浪费);能耗大,生产率低。
当前的筑路工程中,主要靠人工指挥,机械由人工操作,存在着如下弊端:资源配置不够合理;施工信息交换量小,实时性差;易出现物料断流或积压(因为物料具有实效性,所以造成极大浪费);能耗大,生产率低。
1.2机群系统中的多智能主体系统结构
一般的,在多智能主体系统中,多采用分布式控制策略,即各个智能主体的区别在于完成不同的职能,相互之间并无控制关系。wWW.11665.cOM这样做的好处是系统最大地体现了分布式控制的优点,系统灵活性强,易扩展,鲁棒性强,可重用性好。缺点在于这样的系统史多地适用于纯软件环境,在应用于硬件实现的系统中时,会造成系统成本过高、设计过于复杂、系统反应速度较低。对于本文所研究的机群系统而言,为了降低系统的最终成本,系统面向筑路工程机械机群设计,采用了混杂分层式的系统结构(如图1所示)。采用该结构的优点在于可以大大简化系统设计,将传统的中央控制与分布式控制结合起来,在提高系统灵活性的同时,保持系统的反应速度和不过于增加系统的复杂性。
该系统中的智能主体可分为两类:一类是动作执行智能主体,即各单机智能主体;另一类是控制智能主体,包括中央智能控制主体及其他控制主体。
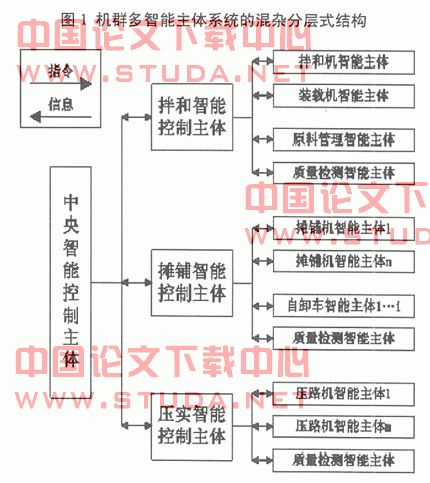
该系统中,各智能化单机(包括智能化拌和机、摊铺机、压路机、自卸车等)构成了系统的底层。单机本身具有一定的智能和自主权,在一定范围内控制自身运行状态。同时,这些单机都要受上层智能控制主体的控制。上层智能控制主体可按照其职能划分为5个:中央控制智能主体,混合料拌和智能主体,混合料运输智能主体,混合料摊铺智能主体和道路压实智能主体。中央主体处于最高层,有最大的权限,其他智能主体处于第二层,负责各自的专项工作,有相对的局部权限,这是与工程实际相对应的。中央控制智能主体负责监督、协调工程现场,综合现场的各种信息,为工程指挥提供决策支持,并负责对工程指挥的决策进行解释和任务分配。混合料拌和智能主体指挥拌和机完成混合料的拌和,并指挥装载机组协同完成工作。混合料运输智能主体指挥自卸车组,完成混合料由拌和机到摊铺机的输送,以及混合料原料的运输。混合料摊铺智能主体负责调度和指挥各摊铺机,完成路面摊铺工作。道路压实智能主体负责调度和指挥压路机组,完成路面压实任务。路面质量检测系统负责反馈路面质量信息给中央主体。各个主体之间由无线的微波信道构成通讯链路,交换信息,共享信息,构成多智能主体协同工作的机群智能化系统。
中央控制主体是机群系统的核心,用于协调系统的运作。包括如下主要功能:
①任务规划调度,负责管理所有任务的内容,进展状态,性质,合作者情况等信息,根据当前所有任务的级别和调度规则,形成任务调度队列;
②协调控制中心负责协调整个系统的运行,是实现人-机交互的主要功能模块,同时还解决协作过程中的冲突和矛盾,具有应变意外情况的能力。在中央控制主体中构建了知识库系统作为决策支持。
其余的控制主体有如下特征:
①空间的分布化:处于不同的物理坐标;
②内建的平行化:在同一时间各自执行不同的任务;
③功能的专门化:各控制主体的任务小同,在各个控制主体内部可采用不同的控制方式。
1.3采用多智能主体设计机群系统的优点
(1)分布式智能。将一个复杂的筑路任务通过分布式智能主体分解为有限复杂程度的多个了任务,由中央主体、拌和主体、运输主体、摊铺主体和压实主体这5个主体各自负担相应的子任务,充分发挥各个主体的功能与能动性,减轻了中央主体的工作负担与控制的复杂程度。同时,由于各个主体也进行了智能化,提高了对环境的适应性。在传统的集中控制方式中,中央控制系统由于承担了所有的控制工作,往往功能十分复杂,设计与实施时都需要耗费大量的人力物力。系统的风险也集中在中央控制系统,可靠性要求高,成本史是成倍提升。通过多智能主体设计,将系统的智能分布到各个主体上,实现了分布式智能,简化了中央控制。
(2)容错性。由于各个主体具有不同等级的决策权限,并依据其决策权限等级来共享机群系统的信息,单个主体的出错不会造成整个系统的失控。即使中央主体出故障,机群其他部分还可以独立完成当前任务的作业。在筑路施工过程中,由于环境恶劣,系统出现故障在所难免。例如设备保障、通讯故障、电力供应故障以及人为错误等,都是施工现场现实存在的问题。当中央主体出现故障,发出错误指令时,下级控制主体可对本地的局部信息和系统共享信息进行综合,对这个错误指令向中央主体发出疑问,处理主体故障。
(3)高可靠性。由于实现了功能的分布化,提高了整个机群系统的可靠性。机群中的各个主体具有相对独立性,自行其是,单机智能主体或者单个控制主体的故障不会造成全局失控。特别是中央主体一旦失效,其他智能控制主体可以通过相互间的通讯和协调,在一定时间内保证施工的正常进行。这一点,集中控制方式的机群系统根本无法实现,因为它的中央控制系统一旦失效就全局瘫痪了。
(4)高效率。强调机群系统的交互性和协作性,有利于提高机群系统的工作效率,降低能耗,节省物料,从而降低整个施工的成本。
2筑路机械机群智能化系统实现的关键问题
2.1筑路机械机群多智能主体系统的实现
各主体间的通讯网络。通讯网络的实施是主体间信息共享与交换的基础。物理实现以无线通讯为主,采用自建的微波通讯系统或者gsm/gprs短信系统,保证各主体间信道的畅通。网络拓扑采用网状结构,在本系统的5个控制主体之间均存在独立的数据链路,实现信息的交换与共享。
各智能主体的决策推理机设计与功能定义。包括多主体的协同决策模式研究,各智能主体的决策规则,中央智能控制主体和各智能控制主体在决策树中所处的地位以及各自的权限分配。
管理层指令的基于多智能主体的分布式计算求解的算法,就是怎样把管理层下达的一个筑路任务分解并分配给相应的智能主体,形成任务调度序列,由中央智能控制主体居中协调,共同完成施工任务,实现施工调度的优化。
多智能主体的信息处理与融合算法。
机群调度决策系统信息综合(含机群多智能主体状态参数、故障参数,环境参量与突发事件)研究,其中包含了一个基于专家知识库的故障诊断系统。
2.2筑路机械各单机智能主体的实现
单机智能主体的控制系统实现如图3所示,主要采用人-机共栖模式的智能主体形式,核心是研究“人-机”协调决策的方法。
由于各机种的自动化程度不同,人在决策中参与的程度也就有所区别。实现的要点在于:
①主体对象的定义,包括单机的功能、属性、需要检测的信息等;
②主体的定位方式,主体之间通讯方式与主体内部异构通讯协议的集成,包括主体间的通讯方式,主体内部各子系统的通讯,以及二者间的交互;
③对应各机种的知识库,确定最优工艺路线与参数,并集成于各智能主体。
④最终建立各单机智能主体的智能决策控制体系。
3基于多智能主体的机群智能化技术的实施路线
当前,国内外的工程机械厂商已经推出了全系列的智能化的单机,单机智能化的技术己经成熟了。但是,这样的智能单机还不能直接应用到智能化的机群之中,需要添加通讯设备和智能主体控制装置。因此,实施基于多智能主体的机群系统的最好方式是:充分利用国内外现有的工程机械单机智能化技术,将机群智能化技术作为独立的专有技术开发,作为单机的智能主体可以兼容国内外主要厂商的产品。
另外,采用开放式的开发方式,可成立机群智能化的标准化组织,定义当前的智能单机改造成单机智能主体所需提供的外部接口,由各个厂商作为组织成员提供,这样既保护了各自的知识产权,又带动了我国工程机械行业的科技进步,有利于将机群智能化标准树立为在我国实现的国际工程技术标准。特别是在我国加入wto以后,它对实现产业国际化,抢占技术制高点,有着尤为重要的意义。
参考文献:
[1] 牛占文,王树新,郑尚龙.机群智能化工程机械故障诊断系统研究[j],机械科学与技术,2003,22(6):999~1002
[2] 史忠植.多智能主体及其应用[m],北京:科学出版社,2005
[3] 饶运清.基于机群通信的机群控制与智能化管理系统[j],机电一体化,2002,8(3):43~46
[4] 王田苗.智能化工程机械发展战略研究[j],工程机械,2002,12:19