作者:李璋 方华京 潘永才 田茂
论文关键词:网络化系统 控制 保性能 状态反馈
论文摘要:针对大规模、实时性要求较高的集散工业控制环境,建立了闭环控制回路用网络来实现的网络化系统.针对网络化系统,提出了一种多时延系统模型.考虑到模型的不确定因素,推出了无记忆状态反馈、鲁棒保性能控制器的存在条件.给出了如何利用matlab软件进行控制器设计并给出性能优化的方法.仿真结果表明,该控制器有很好的鲁棒性,对所有允许的网络不确定延迟和模型不确定性,具有良好的性能指标,可以用于分散环境下的大型工业控制系统.
网络化系统作为一门交叉学科,既涵盖控制又关联网络.因此在系统设计时,应该综合考虑控制和网络的因素.网络的引入将给系统带来延迟,同时,系统的模型会具有不确定性因素.依照这个宗旨,本文针对带有不确定性模型结构的网络化控制系统,建立了多延迟系统模型,证明了其无记忆状态反馈保性能控制器(guaranteed cost control)存在且使系统稳定的充分条件,并给出了该控制器设计和性能优化的方法.仿真结果表明,对带有不确定性模型结构的网络化控制系统,该控制器具有很好的鲁棒性.
1 多延迟模型的建立
本文所研究的网络化控制系统如图1所示,其中,传感器为时间驱动,且采样周期定常,设为h.控制器和执行器均为事件驱动.系统中,用s和a分别表示信号从传感器到控制器、控制器到执行器之间的网络传输延迟,并且假设控制对象(plant)的全部状态采样值用一个包传输.

假设系统中延迟s和a是定常的,并且小于两个采样周期.因为系统中延迟和周期采样的影响,系统模型将被转换为

由于环境的复杂、器件的老化和非线性等因素,在实际的网络化系统建摸中,系统具有不确定性.因此,本文将考虑具有不确定性因素的网络化系统模型
模型(2)中,假定控制向量 为范数有界,且具有以下形式:
为范数有界,且具有以下形式:

式中:d,ej为反映不确定结构的常数矩阵;而f为满足条件ftf≤i的未知不确定矩阵,其元素lebesgue可测且有界.系统的性能指标定义为

本文研究的问题是对具有模型(2)的网络化控制系统,设计一个无记忆状态反馈控制器
c(k) =kx(k), (5)
使得对所有允许的不确定性,该网络化控制系统是渐进稳定的,且性能指标值满足j≤j*,其中j*是某个确定的常数.通常称具有这样性质的控制器(式(5))是不确定网络化控制系统(式(2))和性能指标(式(4))的保性能控制.
2 保性能控制设计和优化
文献[1~4]中,采用增广状态法,建立起了滞离散网络化控制系统的无时滞的离散模型,然后应用一般的线性二次型规则设计的方法,给出了一种状态反馈控制律.这种方法使系统状态维数增加并给计算带来了一定的困难.同时,将使设计出的的控制器不仅依赖当前的状态,而且还依赖以前的状态.因此,本文针对模型不确定网络化控制系统(式(2)),设计一无记忆状态反馈保性能控制器.在以下主要结论的导出中,要用到文献[3]中的一个引理.引理1[3] 给定适当维数的矩阵x,d和e,其中x是对称的,则x+dfe+etftdt<0.对所有满足ftf≤i的矩阵f成立,当且仅当存在一个常数ε>0时,使得

定理1 对于系统(2)和性能指标(4),若存在矩阵k,对称正定矩阵p,s和t,使得对所有允许的不确定性,矩阵不等式
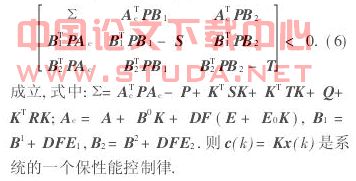
证明 若存在对称正定矩阵p,s,t和矩阵k,使得对所有允许的不确定性,矩阵不等式(6)成立.系统(2)中,取控制律c(k)=kx(k),则导出闭环系统为
x(k+1) =acx(k)+b1kx(k-1)+b2kx(k-2). (7)
选取一个李雅普诺夫函数
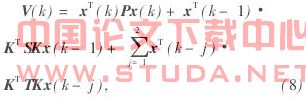
则v(k)是正定的,沿闭环系统(7)的任意轨线,v(k)的前向差分是
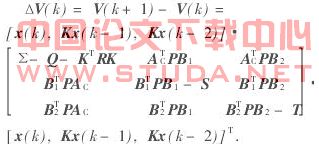
若条件式(6)成立,则对所有允许的不确定性,有 根据李雅普诺夫稳定性理论,网络化控制系统(7)是渐进稳定的.进而由不等式(9)可得
根据李雅普诺夫稳定性理论,网络化控制系统(7)是渐进稳定的.进而由不等式(9)可得 式(10)两边对k从0到∞求和,并利用系统的稳定性可得
式(10)两边对k从0到∞求和,并利用系统的稳定性可得 kx(k)是系统的一个保性能控制律.定理得证.下面以lmi的形式给出该保性能控制器构造的方法.矩阵不等式(6)可以写成
kx(k)是系统的一个保性能控制律.定理得证.下面以lmi的形式给出该保性能控制器构造的方法.矩阵不等式(6)可以写成
式中ω4=-p+ktsk+kttk+q+ktrk,根据矩阵的schur补性质,代入ac,b1和b2的表达式,再利用引理1可得三角阵
再利用matlab的lmi工具箱,可解出具有最优性能的无记忆鲁棒状态反馈控制器.
3 仿真结果
考虑如下控制系统:

不失一般性,不妨假设传感器采样周期h为10 ms,时延s和a均为8 ms.q=diag{1,1},r=0.3,d=[0.1 0.1]t,e=0.1,e0=0.1,e1=0.1,e2=0.2,根据前面的讨论,通过matlab的lmi工具箱可以构造出的最优性能鲁棒控制器为
c(k) = [0.112 1-0.126 1]x(k).
闭环系统性能指标的最优上界为112.254 1.仿真结果表明,该无记忆状态反馈保性能控制律,对允许的网络延迟和模型不确定性,确实具有良好的性能.
参考文献
[1] zhen wei, xie jianying. online-evaluation control fornetworked control systems[c]∥ieee conference ondecision and control. las vegar: ieee controlpress, 2002: 1 649-1 650.
[2] lian feng-li, jame m. optimal controller design andevaluation for networked control systems with distrib-uted constant delays[c]∥proceedings of americancontrol conference. anchorage: ieee controlpress, 2002: 3 009-3 014.
[3] li yu, gao furong. optimal guaranteed cost controlof discrete-time uncertain systems with both state andinput delays[j]. journal of the franklin institute,2001, 338(1): 101-110.
[4] park chang-woo. lmi-based robust stability analysisfor fuzzy feedback linearization regulators with its ap-plications[j]. information science, 2003, 152: 287-301.