зїепЃКРюХєЁЁУЯЮРЗцЁЁГТРћГЌЁЁРюыоЁЁ
ЁЁЁЁТлЮФеЊвЊЃКЦНЬЈЪНЙпадЕМКНЯЕЭГвРППгЩЭгТнЮШЖЈЕФЛњаЕЦНЬЈЃЌЮЊЕМКНЯЕЭГКЭзЫЬЌЮШЖЈЯЕЭГЬсЙЉВтСПЛљзМЃЌЦНЬЈЮШЖЈЛиТЗЪЧЦфжаЪТЙиЕМКНОЋЖШЕФЙиМќВПЗжЁЃЖдЦНЬЈЮШЖЈЛиТЗНјааСЫНЈФЃЃЌНЋФЃК§ПижЦКЭДјЖрИіаое§вђзгЕФФЃК§ПижЦЗНАИв§ШыЦНЬЈЮШЖЈЛиТЗЕФЫЋБеЛЗЛиТЗЯЕЭГЃЌВЂЖдДЫПижЦЗНАИНјааСЫЗТецЗжЮіЃЌРэТлЩЯжЄУїСЫФЃК§ПижЦЗНАИдкЦНЬЈЮШЖЈЛиТЗПижЦжаЕФПЩааадЁЃ
ЁЁЁЁТлЮФЙиМќДЪЃКЮШЖЈЛиТЗЁЁЫЋБеЛЗПижЦЁЁФЃК§ПижЦ
ЁЁЁЁ1964ФъУРЙњЕФlЃЎaЃЎzadehНЬЪкДДСЂСЫУЪЫЗМЏКЯРэТлЃЌЬсГігУЁАСЅЪєКЏЪ§ЁБИХФюРДЖЈСПУшЪіЪТЮяФЃК§адЃЌЕьЖЈСЫФЃК§Ъ§бЇЕФЛљДЁЁЃ1974ФъгЂЙњЕФeЃЎhЃЎmamdaniбажЦГіЕквЛИіФЃК§ПижЦЦїЃЌНќМИФъФЃК§ПижЦвбОгІгУгкЩњЛюЕФИїСьгђЁЃФЃК§ПижЦЪЧвЛжжЛљгкзЈМвжЊЪЖЕФПижЦЯЕЭГЃЌБОЮФНЋФЃК§ПижЦв§ШЫЦНЬЈЮШЖЈЛиТЗПижЦЃЌРэТлбаОПСЫв§ШыФЃК§ПижЦЦїКѓЯЕЭГећЬхадФмЃЌЮЊФЃК§ПижЦдкЮШЖЈЛиТЗжаЕФЙЄГЬгІгУЕьЖЈРэТлЛљДЁЁЃ
ЁЁЁЁ1ЙпЕМЦНЬЈЕФЮШЖЈдРэгыЮШЖЈЛиТЗЕФзщГЩ
ЁЁЁЁ1ЃЎ1ЙпЕМЦНЬЈЕФЮШЖЈдРэ
ЁЁЁЁШ§жсвКИЁЛ§ЗжЭгТнЮШЖЈЦНЬЈЃЌОпгаШ§ЬѕВЮЪ§ВЛЭЌЖјЛљБОЙЄзїдРэЯрЭЌЕФЫХЗўЛиТЗЭЈЕРЃЌгУвдБЃжЄЦНЬЈЬЈЬхЯрЖдгкЙпадПеМфЮШЖЈЁЃЕБЬЈЬхзЊЖЏЪБЃЌЭгТнзЊзгЕФжїжсЯрЖдЙпадПеМфвЊБЃГжЮШЖЈЃЌЭгТнДЋИаЦїЪфГіЭгТнжїжсЯрЖдЙпадПеМфЕФНЧВюаХКХЃЌОЙ§ЗХДѓКЭаЃе§КѓРЁЫЭЕНЦНЬЈСІОиЕчЛњЃЌСІОиЕчЛњВњЩњХЄзЊСІОиЃЌЪЙЦНЬЈЯђМѕЩйНЧВюЕФЗНЯђХЄзЊЃЌжБжСаХКХЦїЪфГіЮЊСуЃЌЦНЬЈЯргІжсЭъГЩЖдЭгТнжїжсИњзйЃЌЦНЬЈЮШЖЈгкЙпадзјБъЯЕФкЁЃwwW.11665.COm
ЁЁЁЁ1ЃЎ2ЙпЕМЦНЬЈЕФЮШЖЈЛиТЗЕФНсЙЙзщГЩЦНЬЈЮШЖЈЛиТЗЪЧвЛИіЮЛжУЗДРЁПижЦЯЕЭГЃЌзщГЩШчЭМ1ЫљЪОЁЃ
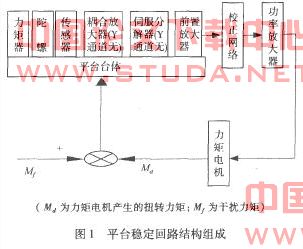
ЁЁЁЁ2ЙпЕМЦНЬЈЮШЖЈЛиТЗЫЋБеЛЗПижЦЗжЮіПђЭМгыБЛПиЖдЯѓЪ§бЇФЃаЭ
ЁЁЁЁЦНЬЈЮШЖЈЛиТЗЕФЕЅБеЛЗПижЦжЛгаЮЛжУЗДРЁЛЗЃЌБОЮФбаОПЦНЬЈЮШЖЈЛиТЗЕФЫЋЛЗПижЦЃЌдкЮЛжУЛЗжЎФкдйМгвЛИіЫйЖШЗДРЁЃЌаЮГЩЫЋБеЛЗПижЦЯЕЭГЁЃЦНЬЈЮШЖЈЛиТЗЕФЫЋБеЛЗПижЦПђЭМШчЭМ2ЁЃ
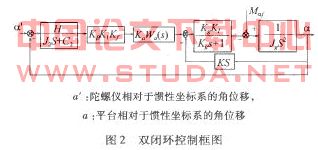
ЁЁЁЁЭМ2жаЃКШеЮЊвКИЁЛ§ЗжЭгТнЕФНЧЖЏСПЃЛЮЊЭгТнДЋИаЦїЕФЗХДѓБЖЪ§ЃЛkЮЊёюКЯЗХДѓЦїКЭЧАжУЗХДѓЦїЕФзмЗХДѓБЖЪ§ЃЛЫХЗўЗжНтЦїБфБШЯЕЪ§ЃЛkiЙІТЪЗХДѓЦїЗХДѓБЖЪ§ЃЛСІОиТэДяЗХДѓБЖЪ§ЃЛаЃе§ЭјТчЗХДѓБЖЪ§ЃЛwa(s)аЃе§ЭјТЗЃЛjФкПђзщКЯМўШЦжсЕФзЊЖЏЙпСПЃЛj2ИЁЭВзщМўШЦНјЖЏжсЕФзЊЖЏЙпСПЃЛcЃКЛ§ЗжЭгТнзшФсЯЕЪ§ЃЛСІОиТэДяЕчЪрШЦзщЕчДХЪБМфГЃЪ§ЃЛkЗДРЁЯЕЪ§ЁЃ
ЁЁЁЁЦНЬЈЮШЖЈЛиТЗЕЅЭЈЕРЫЋБеЛЗПЊЛЗДЋЕнКЏЪ§ЃЌШчЪН(1)ЫљЪОЁЃ

ЁЁЁЁГ§аЃе§ЛЗНкЭтНЋЩЯЪНДњШЫВЮЪ§ЃЌЕУЕНЦНЬЈЮШЖЈЛиТЗЯЕЭГБЛПиЖдЯѓШчЪН(2)ЁЃ
ЁЁЁЁ3ЦНЬЈЮШЖЈЛиТЗЫЋБеЛЗЯЕЭГФЃК§ПижЦбаОП
ЁЁЁЁЦНЬЈЮШЖЈЛиТЗЖўЮЌФЃК§ПижЦЪОвтЭМШчЭМ3ЫљЪОЁЃ

ЁЁЁЁ3ЃЎ1ЮШЖЈЛиТЗФЃК§ПижЦЦїЩшМЦ
ЁЁЁЁ3ЃЎ1ЃЎ1ЧхЮњСПЕФФЃК§ЛЏ
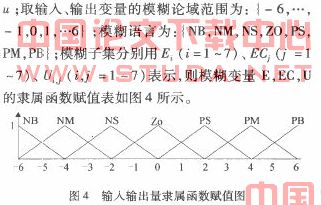
ЁЁЁЁБОЮФжаФЃК§ПижЦЪфШыБфСПЮЊЃКЭгТнЕФЖЈжсКЭЦНЬЈзјБъЯЕЕФНЧВюeКЭЦфдіСПeЃЌФЃК§ПижЦЪфГіБфСПЃК
ЁЁЁЁ3ЃЎ1ЃЎ2ФЃК§ПижЦЙцдђ
ЁЁЁЁОЙ§ГЄЦкЙЄГЬЪЕМљЕФОбщзмНсЃЌЕУЕНЕФЦНЬЈЮШЖЈЛиТЗФЃК§ПижЦЙцдђЃЌШчБэ1ЫљЪОЁЃ

ЁЁЁЁБОЮФЙВгУСЫ49ЬѕФЃК§ПижЦгяОфЃЛ
ЁЁЁЁ3ЃЎ1ЃЎ3ФЃК§ПижЦВщбЏБэ
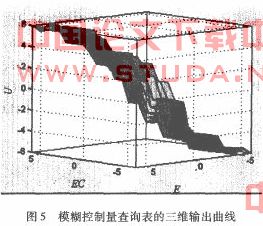
ЁЁЁЁдЫгУmandaniЭЦРэЗЈНјааФЃК§ЭЦРэЃЌИљОнзюДѓСЅЪєЖШддђНјааНтФЃК§ЛЏДІРэКѓЃЌгЩБэ1ЕУЕНФЃК§ПижЦСПВщбЏБэЕФШ§ЮЌЪфГіЧњЯпШчЭМ5ЫљЪОЃЌФЃК§ПижЦСПВщбЏБэШчБэ2ЫљЪОЁЃ
ЁЁЁЁ3ЃЎ1ЃЎ4ФЃК§ПижЦЦїадФмЗжЮі
ЁЁЁЁдкЕЅЮЛНздОЪфШы(1rad)ЪБЯЕЭГЯьгІШчЭМ6ЫљЪОЃК
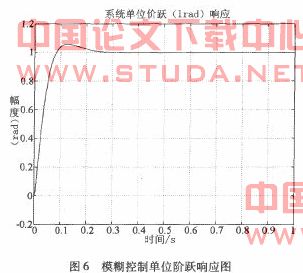
ЁЁЁЁЮШЖЈЛиТЗЩшМЦвЊЧѓЕФадФмжИБъЮЊЃКГЌЕїСПВЛДѓгк20chЃЌЃЛЕїећЪБМфВЛДѓгк0ЃЎ3sЃЛеёЕДДЮЪ§ВЛДѓгк2ЁЃ
ЁЁЁЁШчЭМ6ЫљЪОЃЌЯЕЭГдкЕЅЮЛНздОЪфШЫЯТЃЌЯьгІЧњЯпЕФГЌЕїСПЮЊ5ЃЅЃЛЩЯЩ§ЪБМфЮЊ0ЃЎ1sЃЛЕїећЪБМфЮЊ0ЃЎ3sЃЛеёЕДДЮЪ§ЮЊ1ЁЃадФмжИБъТњзуЛиТЗЩшМЦжИБъвЊЧѓЁЃ
ЁЁЁЁ3ЃЎ2ДјЖрИіаое§вђзгЕФФЃК§ПижЦ
ЁЁЁЁЖдЖўЮЌФЃК§ПижЦЯЕЭГЖјбдЃЌЕБЮѓВюНЯДѓЪБЃЌПижЦЯЕЭГЕФжївЊШЮЮёЪЧЯћГ§ЮѓВюЃЌетЪБЖдЮѓВюдкПижЦЙцдђжаЕФаое§МгШЈгІИУДѓаЉЃЛЯрЗДЃЌЕБЮѓВюНЯаЁЪБЃЌДЫЪБЯЕЭГвбОНгНќЮШЬЌЃЌПижЦЯЕЭГЕФжївЊШЮЮёЪЧЪЙЯЕЭГОЁПьЮШЖЈЃЌЮЊДЫБиаыМѕЩйГЌЕїЃЌетбљОЭвЊЧѓдкПижЦЙцдђжаЮѓВюБфЛЏЦ№ЕФзїгУДѓаЉЃЌМДЖдЮѓВюБфЛЏМгШЈДѓаЉЁЃетОЭвЊЧѓПМТЧдкВЛЭЌЕФЮѓВюЕШМЖв§ШыВЛЭЌЕФМгШЈвђзгЃЌвдЪЕЯжЖдФЃК§ПижЦЙцдђЕФздЕїећЁЃ
ЁЁЁЁДјгаЖрИіаое§вђзгЕФФЃК§ПижЦЫуЗЈБэДяЪНШчЯТЃК

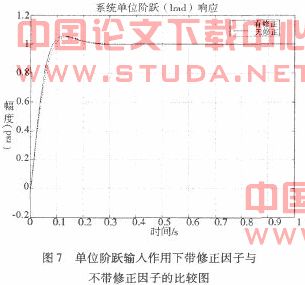
ЁЁЁЁМДЕУЕНФЃК§ПижЦКЭДјаое§вђзгЕФФЃК§ПижЦЦїдкЕЅЮЛНздОЪфШы(1rad)ЪБЃЌЯЕЭГЯьгІБШНЯЭМШчЭМ7ЫљЪОЁЃ
ЁЁЁЁгЩЭМ7ПЩжЊЃЌЯЕЭГдкДјЖрИіаое§вђзгЕФФЃК§ПижЦЦїПижЦЯТЃЌЕЅЮЛНздОЯьгІЕФГЌЕїСПМѕаЁЃЌДяЕНЮШЬЌЕФЫйЖШИќПьЃЌЯЕЭГадФмЕУЕНИФЩЦЁЃ
ЁЁЁЁ4НсТл
ЁЁЁЁБОЮФЖдФЃК§ПижЦРэТлНјааСЫбаОПЁЃЖдЦНЬЈЮШЖЈЛиТЗЩшМЦСЫЖўНзФЃК§ПижЦЦїЃЌЪзЯШЗТецЗжЮіСЫФЃК§ПижЦЦїЖдЯЕЭГадФмЕФгАЯьЃЌЦфДЮдкФЃК§ПижЦЦїжав§ШыЖрАЫаое§вђзгЃЌЖдФЃК§ПижЦЦїНјааСЫИФНјЃЌбаОПБэУїДјЖрИіаое§вђзгЕФФЃК§ПижЦЦїНЕЕЭСЫЯЕЭГЕФГЌЕїСПЃЌИФЩЦСЫЯЕЭГЕФЕЅЮЛНздОЯьгІадФмЁЃ
ЁЁЁЁБОЮФЮЊЦНЬЈЮШЖЈЛиТЗЕФПижЦЬсЙЉСЫвЛжжаТЕФПижЦЗНАИЃЌОпгаживЊЕФЙЄГЬМлжЕЁЃ