摘 要 针对故障诊断知识的模糊性和模糊控制理论在故障诊断领域的广泛研究和应用,结合基于模糊模型故障诊断方法的优越性,本文提出了基于takagi-sugeno模糊模型的故障诊断方法,将其应用到三相异步电机轴承的模糊故障诊断中,并通过实验充分验证了该方法的有效性。
关键词 t-s模糊模型;故障诊断;异步电机轴承
故障诊断一直是人工智能的一个重要研究内容,而且已经得到广泛的研究和应用;现在模糊控制技术在国内外也得到了极大的重视和研究,已经应用于工业控制、汽车驾驶、电梯群控、家用电器等。本文在鉴戒国外故障诊断方法研究的最新动态基础上,对基于模糊模型的故障诊断方法作了进一步的研究和考证。本文提出了基于takagi-sugeno模糊模型的故障诊断方法,使用模糊聚类法划分数据空间,确定最优模糊规则数,并使用最小二乘法对模糊规则的后件参数进行辨识,最后通过对三相异步电机轴承故障进行模糊建模,并使用matlab工具进行仿真实验验证了该方法的诊断有效性。
1 基于模糊模型的故障诊断方法优越性
基于模糊模型
[6]的故障诊断方法,(1)它可以克服传统的故障诊断方法(基于规则、基于人工神经网、基于案例)对新的待诊断对象和尚缺乏诊断专家经验和诊断案例的待诊断对象无法进行诊断的弊端;(2)同时它又可以克服基于模型故障诊断方法的建模难题。wWw.11665.CoM这种方法可以不依赖诊断专家经验和案例,也可以无需建立待诊断对象的精确数学模型,只需待诊断对象(大多数是非线性的复杂系统)模糊模型,根据模糊模型所描述的待诊断对象输入输出变量的模糊映射关系的模糊规则进行诊断。目前,在故障诊断领域的,模糊诊断和模糊控制的研究和应用越来越广泛。
2 t-s模糊模型
自从1965年zadeh提出模糊集合理论以来,对复杂非线性系统地模糊识别和模糊控制受到了人们的很大重视,被广泛应用到工业生产中。其中takagi-sugeno模糊模型是一类基于规则描述的模糊模型,是由takagi和sugeno提出的,所以简称t-s模型。这种模型可以克服多维模糊推理过程中模糊规则过于庞大的弊端,用少量模糊规则生成较为复杂的非线性函数。由于t-s模型的后件参数与输入有关,在逼近性能上要优于mamdani模糊模型。1998年ying证明了结论部分为线性的t-s模糊模型能够以任意精度逼近任何连续函数。目前,在模糊系统研究中,t-s模型占有重要的地位。
takagi-sugeno模糊模型与传统的模糊模型相比有许多独特的优点
[5],主要有三个:⑴该模糊模型包括两种知识:一个是由模糊if-then规则表示的定性知识,另外一个是由局部动态模型表示的定量知识;⑵takagi-sugeno模糊模型可以看作是非线性控制中普遍采用的分段线性近似方法的扩展;⑶takagi-sugeno模糊模型是一个普遍的近似器,即,任何在紧集上的连续函数都可以用该模型以任意精度逼近。
takagi-sugeno 模糊模型的数学描述如下:
t-s模糊模型可由一组模糊规则表示:
l
(l):如果x
1为f
1l,且...,且x
n为f
nl,
则 y
l=c
0l+c
1lx
1+...+ c
nlx
n (1)
其中,f
il为模糊集合,c
i为真值参数,y
l为系统根据规则l
(l)所得到的输出,l=1,2,…,m; i=0,1,2,…,n。
可以看出,这种模糊模型其输出结果为输入变量的线性组合,给定输入变量x=(x
1,…,x
n)
t,则输出y(x)等于各y
l的加权平均
(2)
其中,加权系数包括了规则作用于输入所能取得的所有真值,ω
l的计算公式如下:
(3)
3 故障诊断
3.1 异步电机轴承故障建模
t-s模糊模型的主要思想是把输入空间划分成若干个模糊子空间,在每个模糊子空间内建立一个输入与输出的简单线性关系模型,每个模糊子空间表示一条模糊规则,模糊规则的前件用来表示模糊子空间,后件用来表示这个模糊子空间的输入输出线性关系。
t-s模糊系统的建模主要包括结构辨识和参数辨识
[1,3]。结构辨识指模糊规则数目的确定,主要有网格法、模糊树法和聚类法;参数辨识则是指对模糊规则前件部分的隶属度函数和模糊规则后件的线性表达式所包含的参数进行辩识,可以采用梯度下降法、最小二乘法、遗传算法等优化算法。
t-s模糊模型的本质是将非线性系统通过模糊区间划分表示为若干简单的线性关系,然后再对模型的输出进行模糊推理,从而来表示复杂的非线性系统。t-s模糊模型的主要优点是,它的输出能由规则库中变量的诸隶属度函数以及规则的输出精确确定。
理论上,t-s模型可以确保其输出表面的连续性,并以任意精度逼近连续的非线性系统,它很适合于基于模型的控制系统。尽管t-s模型能够以较少的模糊规则去描述一个高度非线性系统,并且还有巨大的应用潜力.但建立其模型也不是一件容易的工作,其辨识步骤中的结构辨识和参数辨识混在一起,计算量大,所以其参数辨识过程的复杂性又在某种程度上限制了其应用的场合。
在异步电机发生的故障中,轴承故障、定子绝缘故障与绕组股线断股、鼠笼转子断条等故障约占鼠笼异步电机故障的80%
[4],本文把其中典型的一类轴承故障作为研究对象。实验在一个三相异步电动机上完成,设定调速为30hz,负载为10转矩,分别在正常情况下和故障情况下(少两个珠,一个上有中坑),用传感器测量轴承(深沟63系列)得到的不同时刻振动信号。
由于建模的需要,对所获得的振动信号经过小波分析转换成不同频段的能量值。实验共获得两组数据样本,每组19个,从两组数据对比,我们可以很明显地看出轴承出现了故障,数据如下:
表1 正常与故障数据
正常特征值
0.3340 0.1594 0.1557 0.3252
0.2333 0.3340 0.1474 0.1817
0.1205 0.0105 0.0164 0.2900
0.0011 0.0030 0.0038 0.0180
0.0163 0.0014 0.0217
故障特征值
0.7032 0.3346 0.3077 0.4104
0.1644 0.7032 0.4416 0.2585
0.4617 0.3288 1.1680 0.4923
0.0172 0.0433 0.0466 0.1904
1.0021 0.0124 0.0600
取15个正常数据样本对进行分组,分别作为在高、中、低三个频率分析得到能量数据。
x
高={0.3340 0.1594 0.1557 0.3252 0.2333}
x
中={0.3340 0.1474 0.1817 0.1205 0.0105}
x
低={0.0164 0.2900 0.0011 0.0030 0.0038}
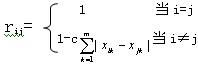
使用模糊聚类法对输入变量进行分类,确定最优的模糊规则数。首先,通过建立相似关系矩阵,使用绝对值减数法确定元素x
高,x
中,x
低,之间的关系值r
ij:
 (4)
(4)
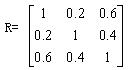
其中,c适当选取,使0≤r
ij≤1。这里取c=0.5,计算得相似关系r矩阵为
其次使用编网法
[23],如下图所示,可将输入变量分为两类,从而可以确定模糊规则数。
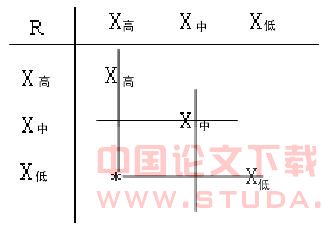
图1 编网法
模糊规则如下:
规则1:if x
高 and x
低, 则y
1=c
10+c
11x
高+c
12x
低
规则2: if x
中, 则y
2=c
20+c
21x
中
①前件参数辨识
模型前件参数辨识即是确定前件中隶属度函数,这里使用高斯函数,即令
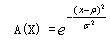 (5)
(5)
这里ρ为均值,σ为方差
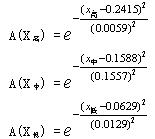
可分别获得x
高、x
中、x
低的隶属度函数:
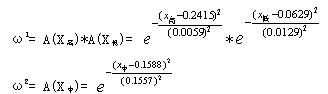
由这些隶属度函数可以根据公式(3)得到各条规则的权重,分别为:
②后件参数辨识
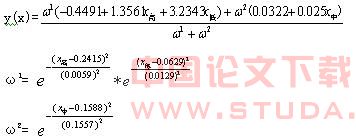
模型的后件参数辨识使用最小二乘法,我们知道最小二乘法可以用来处理一组数据, 可以从一组测定的数据中寻求变量之间的依赖关系, 这种函数关系称为经验公式。这里我们假定在正常情况下的输出曲线为抛物线型。假定为y=x
2。利用最小二乘法,每次只计算一条规则后件参数。最后使用极值原理令总偏差最小获得方程组,解得各规则的系数,得到各规则后件的线性表达式:
y
1=-0.4491+1.3561x
高+3.2343x
低
y
2=0.0322+0.025x
中
则最终根据公式(2)得出轴承故障的t-s模型的总输出:
 3.2 基于故障模型的计算机仿真
3.2 基于故障模型的计算机仿真
matlab软件maths works公司1984年推出的一套高性能的数值计算和可视化软件,它集数学计算、图形计算、语言设计和模糊逻辑等30多个工具为一体,具有极高的编程效率,由于它是一个开放环境,已经成为国际控制界广泛使用的语言之一。本文采用t-s模型动态逼近非线性系统,利用matlab软件中的模糊控制工具箱,以异步电机轴承的故障模型的仿真实验,验证了该方法的有效性。
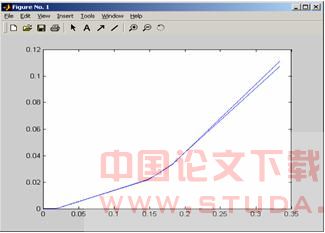
(a)正常数据仿真对比曲线
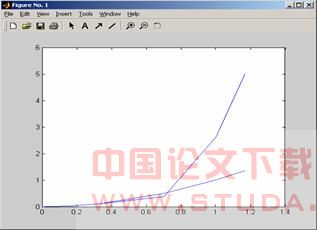
(b)故障数据仿真对比曲线
图2 仿真结果
4 总结
由此实验结果,可以明显看到该模型的有效逼近性。由t-s模糊模型的良好逼近性,把该类模糊模型应用到本人硕士毕业论文所研究的基于模型的多agent诊断系统中,作为各类故障诊断agent的诊断知识库中的诊断模型,可以更精确地对故障部件作出诊断。当进行故障诊断时,由故障诊断agent内的故障诊断推理器根据诊断知识库中的这个模糊诊断模型和一些诊断知识,进行诊断推理与决策,最后给出诊断结果。
参考文献
[1] 赵恒平,俞金寿. 一种基于t-s模糊模型的自适应建模方法及其应用[j] .华东理工大学学报, 2004.04 442-446
[2] 刘正士, 刘立华. 基于模糊神经网络的滚动轴承滑动擦伤诊断[j]. 农业机械学报, 2002.01 97-99
[3] 扬杰 ,张晓莉等. 基于模型的故障诊断中的模糊建模和推理[j] .上海交通大学学报, 1999.04 418-421
[4] 叶立明, 姜建国, 苏鹏声 .感应电机常见故障的模糊诊断(之一)[j]. 电工电能新技术,1997.01 30-34
[5]刘忠信, 陈增强, 袁著祉 .基于t-s模型的模糊广义预测控制[j] 南开大学学报 2000.12 114-119
[6] x.ren s.m.hargrave h.a.thompson p.j.fleming multi-agent systems for model-based fault diagnosis (2001)[j] ifac new technologies for computer control