ժ Ҫ�������ɲ�ɫccd���������ṹ��Ͷ��װ����ɵ���ά��ɫ���̲���ϵͳ����ȡ��������IJ�ɫͼ��ϻ����Ӿ�˫Ŀ�Ӳ�ԭ����ͼ������������������������ά��ɫ��Ϣ��������ά��ɫ���ƣ�����ʵ�ֲ����������ά��ɫģ���ع���
�ؼ��������̣�˫Ŀ�����Ӿ�������ƥ�䣻��ɫ����
1 ����
ͨ����ʮ��ķ�չ�������Ѿ�ȡ���˺ܴ�Ľ�չ����ģ������ҵ�����ҵ����Ϸҵ������ҵ��Ьҵ������ҵ��ҽѧ���̼���Ʒ������Ƶȷ��淢������Ҫ����
[1]�����ǣ��������缼�������չ���ڶ�ý�塢��Ϸҵ������ҵ��ҽѧ�Լ������������Ʒ�����ֻ��ȷ��棬Ŀǰ�ĵ�ɫ��ά�������Ѳ���������������������£���ɫ��ά���ֻ������ݴ���ϵͳ��ʼ���չ����ά��ɫ���̼�����Ϊ�����о��зdz���Ծ��һ����֧��
2 ϵͳ���
�����еIJ���ϵͳ��Ϊ�Ӵ�ʽ�����ͷǽӴ�ʽ���������ڷǽӴ�ʽ���������ڶ��ŵ㣬���������̲���ϵͳ�о����ص㣬Ŀǰ�ձ�ʹ�õ��ǵ�ɫ�ṹ�����ϵͳ�������������ڰ�ccd��������Ӳ�ͬ�Ƕȵõ���������Ķ�άͼ������˫Ŀ�Ӳ�ԭ������ô�������������Ϣ��WWW.11665.cOM�ɴ˵õ����������������ά����
[2]��
�ڵ�ǰ��ɫ�ǽӴ�ʽ�ṹ�����ϵͳ�Ļ����ϣ����ò�ɫccd����������ò�ɫ��Ϣ��ȡ�������õ���ά����IJ�ɫ��Ϣ(r��g��b����)��������������Ŀռ�����ƥ�䣬�Ӷ��õ������������ά��Ϣ(x��y��z��r��g��b)�����ɲ�ɫ�����ļ���Ϊ��ά��ɫģ���ع��ṩ���ݻ�����
ϵͳ��Ҫ��ɲ���(�μ�ͼ��)��
�ٲ�ɫccd�����������ά�궨�У��۱����դͶ��װ�ã���ͼ��ɼ�������pc����
����ϵͳ�IJɼ�������һ�������դͶ������������ɫccd�������ɣ�Ͷ�����̶������룬��̨������ֲ������ࡣ���ȣ�Ͷ����ֱ��Ͷ����ṹ��դ������������棬����IJ�ɫccd�������ȡ����Ķ�άͼ���ţ��ر�Ͷ����������Ȼ����������£��������������ȡ���������ά��ɫͼ��������ɼ����źž��ɼ���ת�������pc�����к���������
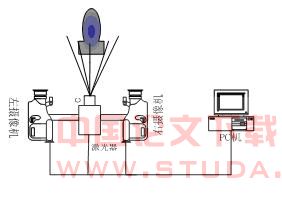
ͼ�� ����ϵͳģ��
3 ��ά��ɫ���̹ؼ�����
3.1 ������궨
�ɻ����Ӿ�֪ʶ��֪��ͨ��˫Ŀ�������ô����������ά��Ϣ���ͱ���ȷ����������������������ϵ�������������ͨ����������������б궨������ɡ�
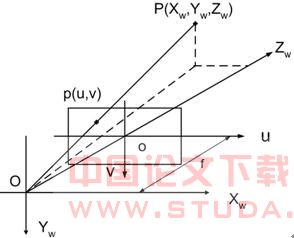
ͼ2 �����ģ��
�����ģ��
[3](�μ�ͼ2)�е�ӳ���ϵ��
��������ϵһ��p(xw��yw��zw)�������ͼ������ϵ��ӳ��Ϊp(u��v)�����ߵ����������¹�ϵ��

����
��fΪ���������Ч���࣬dx��dyΪ����֮��ˮƽ�ʹ�ֱ����ľ��룬 (u
0��v
0)Ϊ�����ڼ����ͼ������ϵ�е����꣬rΪ3��3��ת����t= (t
x�� t
y�� t
z)
tΪƽ�ƾ��궨�Ľ�����ǵõ���������������
����������궨�ķ����������о��ıȽϳ��죬����tsai(1986)����Ļ��ھ���Լ����������
[4]���о����ص㣬���Ļ���tsai��rac���������������ı궨�����������λ����������ϵԭ�㣬������ת��������������������ϵ����ת����

��ƽ�ƾ���t= (t
x�� t
y�� t
z)
t��ͨ��rac�����������������������������
3.2 �ɼ��������ά��Ϣ(xwywzwrgb)
������ccd������ֱ�����ά����Ķ�ά��ɫͼ��ؼ������ͨ��ƥ��õ��������ά��Ϣ�Ͳ�ɫ��Ϣ��
1)��ά��Ϣ�Ļ�ȡ
Ŀǰ������ƥ����㷨��Ҫ��Ϊ�����ࣺ����ƥ�������ƥ��
[5]������ƥ���ͼ���и����ص���Χ��ͼ����������лҶ�������㣬ͨ�����ֵ��ȷ��ƥ���ϵ������ƥ����Եõ��ܼ����Ӳ�ͼ���������㷨���ڢټ��������ٶ�������ƥ�䴰�ڴ�Сѡ�����ѡ��۶Է������ͷ���������е�ȱ�ݡ�����ƥ��ͨ��ѡ���Ե���ǵ����������Ϊƥ��㣬�������ƥ���㷨��ƥ���ٶȽϿ졣������ƥ�侫�Ƚϸ�(�����ؼ�)���������㷨ֻ�ܵõ�ϡ���Ӳ�ͼ���ۺ��������ַ�������ȱ�㣬���IJ��û���㷨�����ֲ���������ƥ�������ƥ�����ַ�������ƥ�䡣
���������ǣ�
(1)������������ɫccd�������ò�ɫ��άͼ��(bmp)���лҶȻ������������б�Ҫ��ͼ��Ԥ����
[6](��ֵ�˲�����˹�˲���ֱ��ͼ���⻯��������˹��)����������
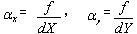
ͼ3 sobel����
(2)����ƥ����Ҫ�����㣬������ͼ����ʾ��sobel���Ӷ�����ͼ����о�������
[7]����ͼ�����ص��ݶȨ�f(x��y)����ijһѡ����ֵ�ĵ���Ϊ��Ե�����㣬�õ�������������ұ�Ե������ͼ��
(3)����˫��ƥ�䷨
[8]�����ұ�Ե����ͼ�еı�Ե���������ƥ�䣬����ѡȡ��ͼ�еı�Ե�����㣬���ݻҶȡ��ݶȡ������ߵ�Լ������������ͼ�е�������ƥ�䣬Ȼ����ѡȡ��ͼ�еı�Ե���������ͼ�е�������ƥ�䣬���ѡ��˫��������ƥ���ĵ����Ϊ����ƥ��㣬�õ���Ե��������Ӳ�ͼ��
(4)��һ����ֻ�ǵõ���Ե���ϡ���Ӳ�ͼ��Ϊ�˵õ��ܼ����Ӳ�ͼ����Ҫ�Դ����DZ�Ե���������ƥ�䣬����ǵõ���Ե������ʵ���ϰ�����ͼ��ָ������С������ʹ����С������ƥ��������ռ䣬�Ӷ������ƥ���Ч�ʺ�ȷ�̶ȡ���ͼ��һ��m(i��j)������ͼ�������Ӧ��ƥ��㣬ʹ��m��n����ش��ڣ�ʹ����λ��m��������ͼ�У���ͬһ��ˮƽ����Ѱƥ���n��ʹ��Э����ϵ��
[9]������m��n֮������Ƴ̶ȣ������ҵ����ƥ��㡣
(5)ͨ�������ĸ����裬���Եõ�����������������p�����������ͼ����ӳ���(p
l��p
r)�Ķ�Ӧ��ϵ���Լ���������ӳ����ͼ������pl(x
l�� y
l)��pr (x
r��y
r)���ɱ궨�õ�����Ч����f
l��f
r�Լ���ת����r��ƽ�ƾ���t���м��㣬���Եõ��������������������ά����(x
w��y
w��z
w)��
���㹫ʽ���£�
2)��ɫ��Ϣ��ȡ
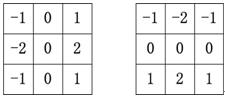
��ϵͳ�ɼ��Ķ�ά��ɫͼ��Ϊ24λ��bmp�ļ���λͼ�ļ�ͷbitmapfileheaderΪ14�ֽڣ�λͼ��ϢͷbitmapinfoheaderΪ40�ֽڣ������е�ɫ�壬�μ�ͼ��������bmp�ļ���ʵ��λͼ������ÿ�����ֽڱ�ʾһ�����ص��rgb��Ϣ(��bgr˳������)�����Ǵ��µ��ϣ����������еģ���ͼ��ÿһ��������ռ���ֽ���������4��������(�粻�㣬�貹��)
[10]��

ͼ4 bmp�ļ��ṹʾ��ͼ
��bmp�ļ��Ĵ�С(�ֽ�)Ϊsize��ͼ����ij��p(u��v)�������ļ��е��ֽ�λ��Ϊpos����

�Ѿ��õ���������p����ά����( x
w��y
w��z
w )���Լ���p�����������ͼ����ӳ���pl(u
l��v
l)��pr(u
r��v
r)�Ķ�Ӧ��ϵ��ʹ��vc�е������꣬getrvalue��getgvalue��getbvalue��������ͼ���ж�ȡ���ص�p
l��p
r��rgb������
�ۺ�����(��p
l��p
r)����ɫ��Ϣ��������������p����ɫ��Ϣ(rgb)�����ˣ�����ȷ�����������������ά��Ϣ(x
wy
wz
wrgb)�����⣬��dz����Ҳ�ɫͼ�����ɫ��Ե�㣬��Ϊ�������ݾ���ʱ��Լ������(��ɫ�߽�㲻�ܾ�����������ع�ģ�͵���ɫ�߽�ģ��)��
3)��ɫ���Ƶ�����
�ɱ������������������ά��Ϣ������ascii��ʽ�IJ�ɫ���������ļ�����ʽ���£�
����
65536
��� x y z r g b
0 20 30 40 255 0 0
1 30 40 50 0 255 0
����
���գ�ascii��ʽ�IJ�ɫ�����ļ������ݽӿ�ת����������������֧�ָ�ʽ���ļ��������ά��ɫģ���ع���
4 ������
Ŀǰ����ά��ɫ�������������չ�������ڵ�ɫ�ǽӴ��ṹ�����ϵͳ�Ļ����ϣ����ò�ɫccd�������ȡ��������IJ�ɫͼ���ۺ����û����Ӿ���ͼ����������Ϊ��ò�������IJ�ɫ���������ṩ��һ�ַ�����Ҳ�Ƕ���ά��ɫ���̼����о���һ�����波�ԡ�
�����
[1]���Σ�ͯˮ��.���̼���[m].��������е��ҵ�����磬2003��26-65
[2]���������˷�.atos����ʽ��ѧɨ���ǵĹ���ԭ����ϵͳ�궨[j].��������2006���40��
[3]�Ź��.�����Ӿ�[m].��������ѧ�����磬2005��24-17
[4]roger y. tsai.a versatile camera calibration techniaue forhigh-accuracy 3d machine vision metrologyusing off-the-shelf tv cameras and lenses��ieee journal of robotics and automation[j]��vol. ra-3�� no. 4��august 1987
[5]���ȣ��ܾ�����Դ��.�����Ӿ�ƥ�似��[j].�����������Ӧ�ã�2003.15
[6]�����̡�����ǿ��������.����ͼ��������[m].���������ӹ�ҵ�����磬2004��61-95
[7]�ܳ���.visual c++ͼ�������[m]. ���������ӹ�ҵ�����磬2006��290-293
[8]����������Ȩɭ�����.��������Լ����������ص�����ƥ�䷽��[j].�����������Ӧ�ã�2003.34
[9]����Ӣ�����.����������صĶ�̬ƥ�䷽��.[j].��繤�̣�2004.12
[10]�����.����ͼ�����������[m].�������廪��ѧ�����磬1999