摘 要 在附有条件的间接平差模型的基础上,提出用归一化大角度坐标转换模型计算盾构机姿态,并从其原理、方法以及精度上进行了分析。应用结果表明:利用坐标转换法计算盾构机姿态,与常规解方程法相比较更能有效利用参考点的所有信息,计算过程简明,且便于程序实现。
关键词 地铁隧道 大角度坐标转换 盾构机 归一化 转换参数
1 引言
在地铁隧道贯通测量中,及时地获取盾构的姿态非常重要。而盾构的姿态通常是根据全站仪获取盾构上的特征点的坐标来计算的。文献[1]中介绍的方法是通过解方程组而得出切口o、盾尾c的坐标,其数学模型为点与点、点与平面间的距离公式。这种解法数学模型简单,但只能从多个固定参考点中选取3个,没有多余观测,不能作有效的检核,这样就丢弃了一些有用信息。因此本文设想先求出盾构机轴线局部坐标系与实际三维空间坐标系两种坐标系的转换参数,然后再利用转换参数求出盾首中心和盾尾中心点的实际坐标,获取盾构机的空间位置信息。该方法数学模型的实质是空间直角坐标系之间的转换。基本的坐标转换模型包括布尔沙-沃尔夫转换模型、莫洛金斯基转换模型和范士转换模型等,但它们都是基于小角度的转换。由于这两种坐标系统之间的欧拉角可能很大,所以在纠正过程中不能采用基于小角度转换的空间直角坐标转换模型。本文在基于大旋转角的空间直角坐标转换模型的基础上,对计算模型进行了归一化计算,使计算过程更为简明,便于程序的实现,同时还分析了坐标转换模型的精度。wWw.11665.cOM
2 坐标转换原理
2.1 坐标转换原理
本文提出的转换模型的主要思想是在文献[2提出的坐标转换模型的基础上,将13个未知参数包括旋转矩阵中9个方向余弦、3个平移和1个尺度,利用归一化坐标转换公式消除坐标平移参数,根据旋转矩阵的正交特性可列出6个条件方程。如果测定了n个点,则有3n-3个误差方程,加上6个条件方程,共有3n+3个方程,10个未知参数,可以按附有条件的间接平差解算。
2.2 坐标转换模型
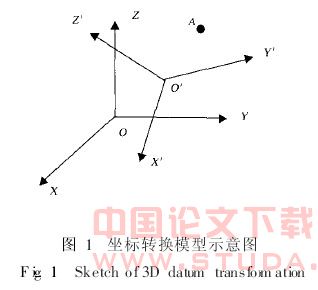
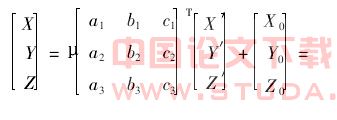
设点a在空间直角坐标系o-xyz中的坐标为(x,y,z),在空间直角坐标系o′-x′y′z′中的坐标为(x′,y′,z′)。x′轴在o-xyz中的方向余弦为(a1,b1,c1),y′轴在o-xyz中的方向余弦为(a2b2,c2),z′轴在o-xyz中的方向余弦为(a3,b3c3);而x轴在o′-x′y′z′中的方向余弦为(a1,a2a3),y轴在o′-x′y′z′中的方向余弦为(b1,b2b3),z轴o′-x′y′z′中的方向余弦为(c1,c2,c3),μ为尺度比,(x0,y0.z0)为o′-x′y′z′的原点相对于o-xyz原点的平移量。两套坐标的关系用矩阵表示为:
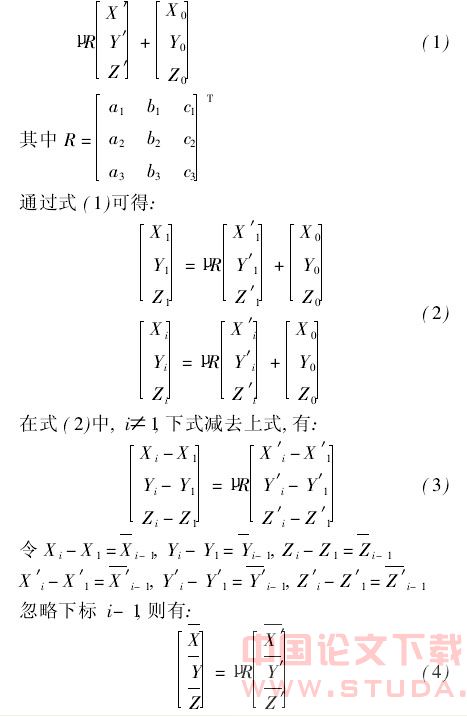
这就是归一化的坐标转换公式。在该公式中,消除了坐标平移参数,而仅保留旋转参数和尺度参数。该公式的误差方程可简单表示为:
v=ax-l (5)
其中,
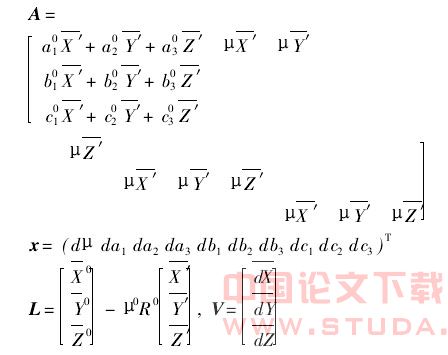
上标为0的数为各未知参数相应的近似值,前缀为d的数为其相应值的改正数。
旋转矩阵是正交矩阵,存在下列条件:
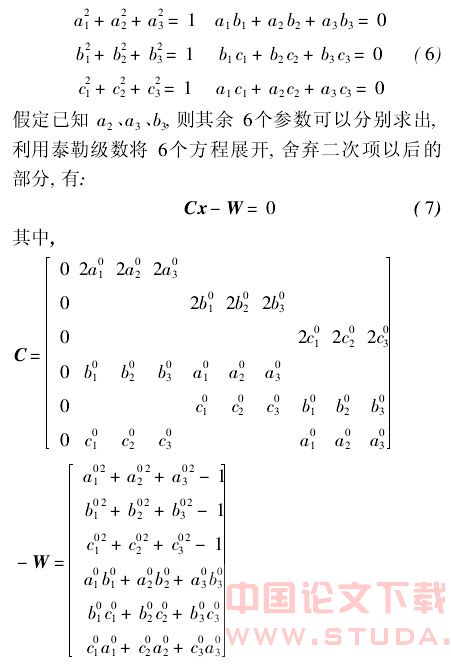
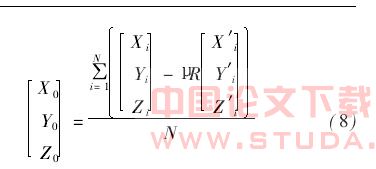
如果有3个以上的已知公共点,按附有条件的间接平差法解算式(6)、式(7),就可以求出x,即一个尺度参数和9个方向余弦参数。将这10个参数代入式(1),并代入多个公共点的坐标,可求出多组平移参数,最后取这些平移参数的平均值:
2.3 坐标转换模型的精度
坐标转换模型的精度对数据转换结果的精度起决定性影响,本文采用的公式为:
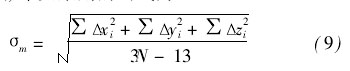
式中,δxi=xi-x′i,δyi=yi-y′i,δzi=zi-z′i。xi,yi,zi为实际三维坐标系的公共点实测坐标,x′i,y′i,z′i为求得坐标转换参数后转换的公共点在实际三维坐标系的坐标。n为公共点的点数,σm的值越大,转换模型的精度越低,反之,则转换模型的精度越高。
3 算例
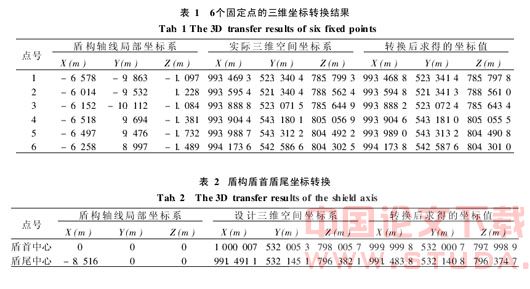
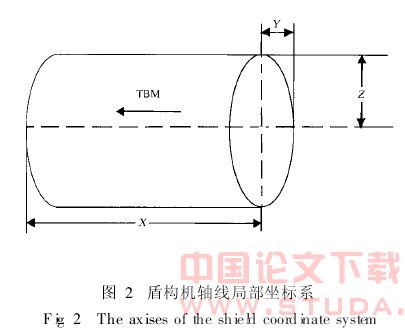
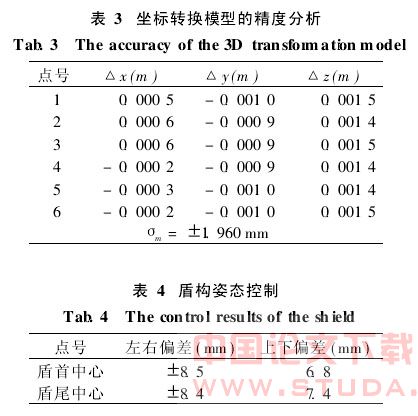
按照上述基于大角度的坐标转换参数的归一化求解方法,利用盾构机内固定的6个参考点测得的基于盾构机轴线的局部坐标系(如图2)坐标与实际三维坐标,两套坐标数据见表1,即可按照坐标转换模型反推两种空间直角坐标系的转换参数。求出坐标系的转换参数后,将盾构机的盾首和盾尾的轴线局部坐标系三维坐标转换成实际三维坐标(见表2),再与盾首盾尾的设计三维坐标进行轴线偏差计算,以确定盾构机的实时姿态,坐标转换模型的精度计算见表3,盾构机的轴线偏差结果见表4。
4 结论
实例证明,利用空间直角坐标系的转换可以直接计算盾构机盾首盾尾的实际三维坐标,与常用的解方程组计算方法相比,计算坐标系转换参数后再直接求出盾首盾尾的实际三维坐标的方法能有效地利用盾构机内所有参考点的信息,而不再局限于任意3个点的信息,同时坐标转换模型的精度也满足了要求,而且它采用的基本计算原理还是基于附有条件的间接平差模型,计算过程简明,便于程序的实现。
reference
1 冯冬健,潘庆林,张凤梅.地铁盾构施工中盾构机姿态定位测量的研究[j].工程勘察,2003,5:57~58,61.
1 fengdongjian,panqinglinandzhangfengme.iontheo-rientationsurveyoftheshieldinsubwayconstruction[j].geo-technicalinvestigation&surveying,2003,5:p57-58,61.(inchinese)
2 陈义,沈云中,刘大杰.适用于大旋转角的三维基准转换的一种简便模型[j].武汉大学学报信息科学版,2004,12(29):1101~1105.
2 cheny,ishenyunzhongandliudajie.asimplifiedmodelofthreedimensional-datumtransformationadaptedtobigro-tationangle[j].geomaticsandinformationscienceofwu-hanuniversity,2004.12(29):1101-1105.(inchinese)
3 刘大杰,施一民,过静?.全球定位系统(gps)的原理与数据处理[m].上海,同济大学出版社,1996.
3liudajie,shiyimingandguojingjun.theprincipleofgpsanddataprocess[m].shangha:itongjiuniversitypress,1996.(inchinese)
4杨伟,刘春,刘大杰.激光扫描数据三维坐标转换的精度分析[j].工程勘察,2004,3:61~65.
4yangwe,iliuchunandliudajie.accuracyanalysisof3dcoordinatetransformation
forlaserscanningdata[j].geo-technicalinvestigation&surveying,2004,3:61-65.(inchinese)
5樊功瑜.误差理论与测量平差[m].上海:同济大学出版社,1998.
5fangongyu.theoryoferrorsandsurveyadjustment[m].shangha:itongjiuniversitypress,1998.(inchinese)